CAN-BUS is a common protocol and widely used in industry due to its long travel distance, medium communication speed, and high reliability. Now you can realize a CAN-BUS project through this tiny little development board.
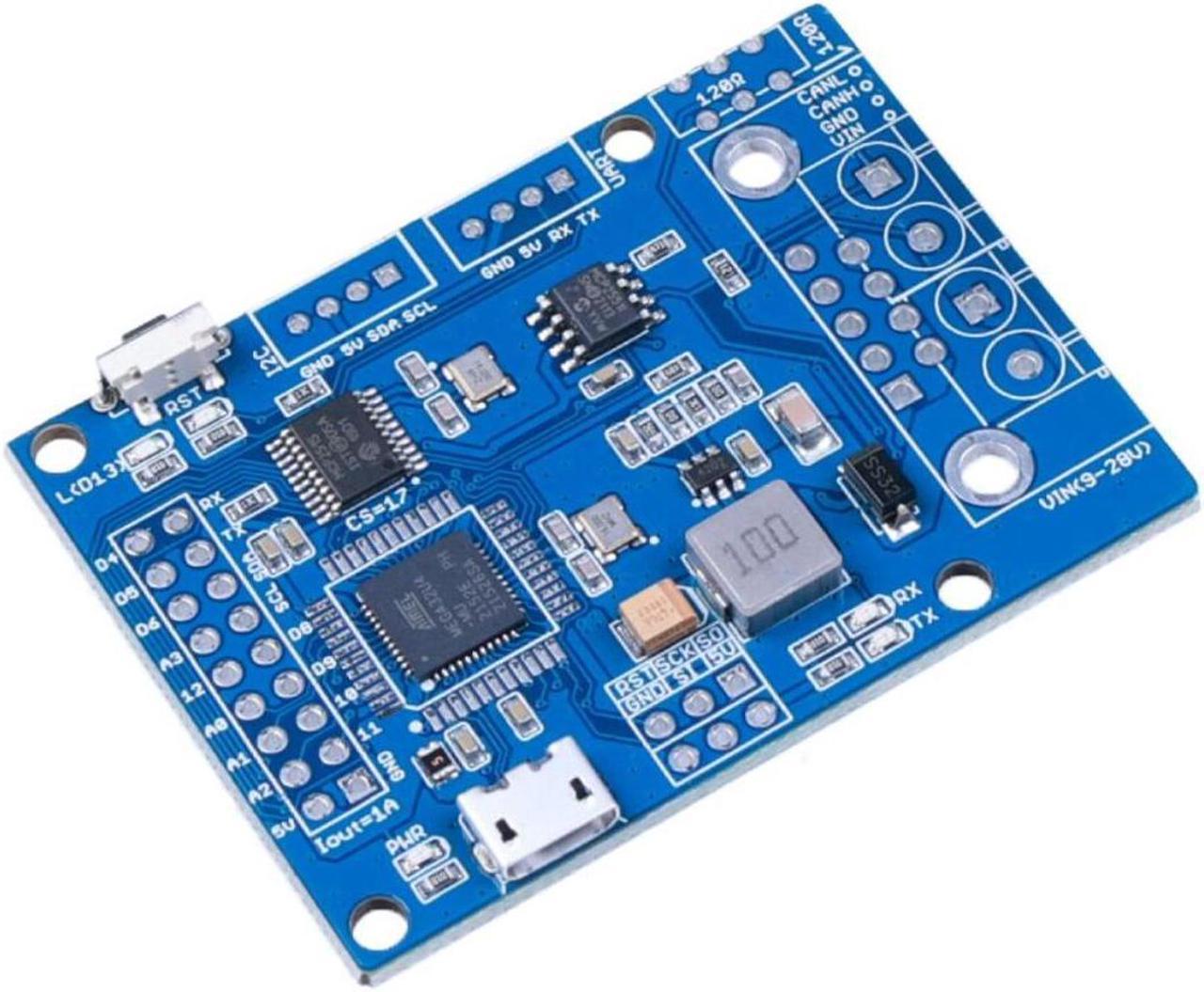
Because of the ATmega32U4 onboard chip, this board has rich resources in pins. As a matter of fact, there are 18 pins based on the core chipset up on the board, which include digital pins, analog pins, UART, and an I2C interface. Besides, this CANBed adopts the MCP2515 CAN Bus controller with SPI interface and MCP2551 to achieve the CAN-Bus capability. There are also two kinds of CAN Bus interfaces for various demands which are sub-D9 connector and terminal block interface. They would fit all your needs in the connecting method.
This CAN-Bus development board is perfectly compatible with Arduino IDE. With the help of the Arduino CAN-Bus library, you will save plenty of time for your CAN project.
Application
Car hacking: The user can connect the circuit board to the OBD interface through the sub-D connector to read the data of the car
Easy building prototype: ATmega32U4 chip leads out various additional functions which help especially beginners build various prototypes.
Specification
Parameter Value
MCU ATmega32U4 (with Arduino Leonardo bootloader)
Clock Speed 16MHz
Flash Memory 32KB
SRAM 2.5KB
EEPROM 1KB
Operate Voltage(CAN-BUS) 9-28V
Operate Voltage (MicroUSB) 5V
Input Interface sub-D
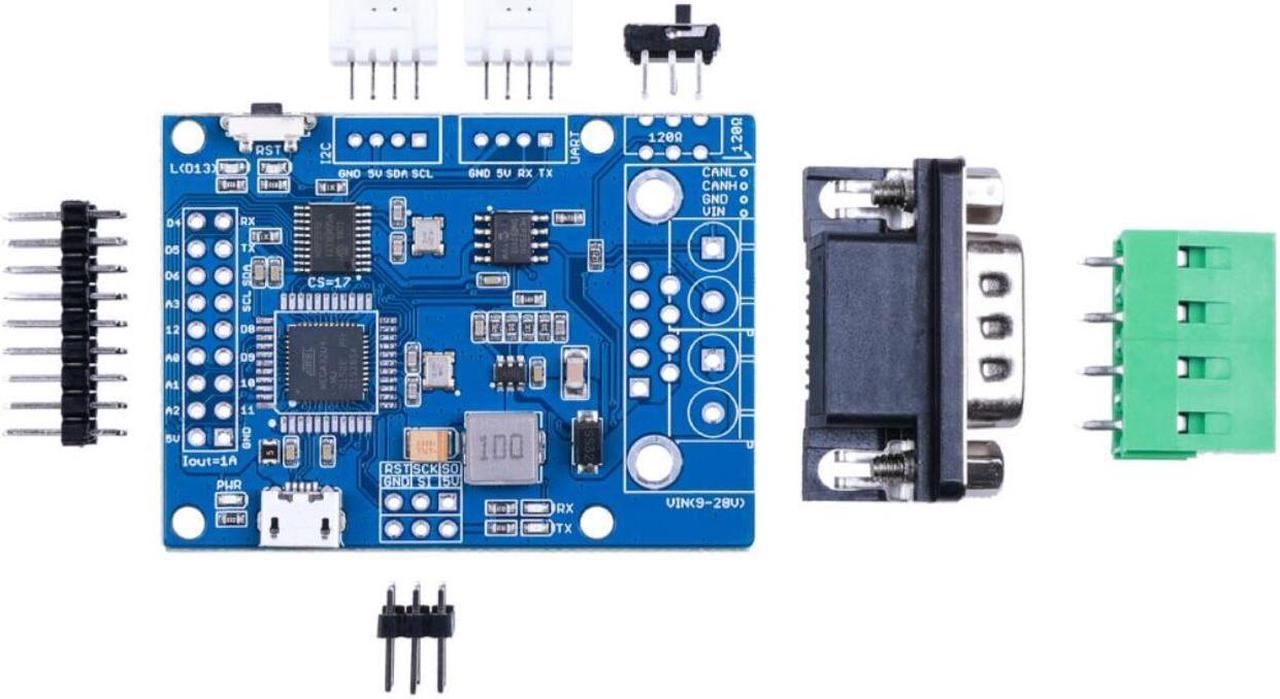
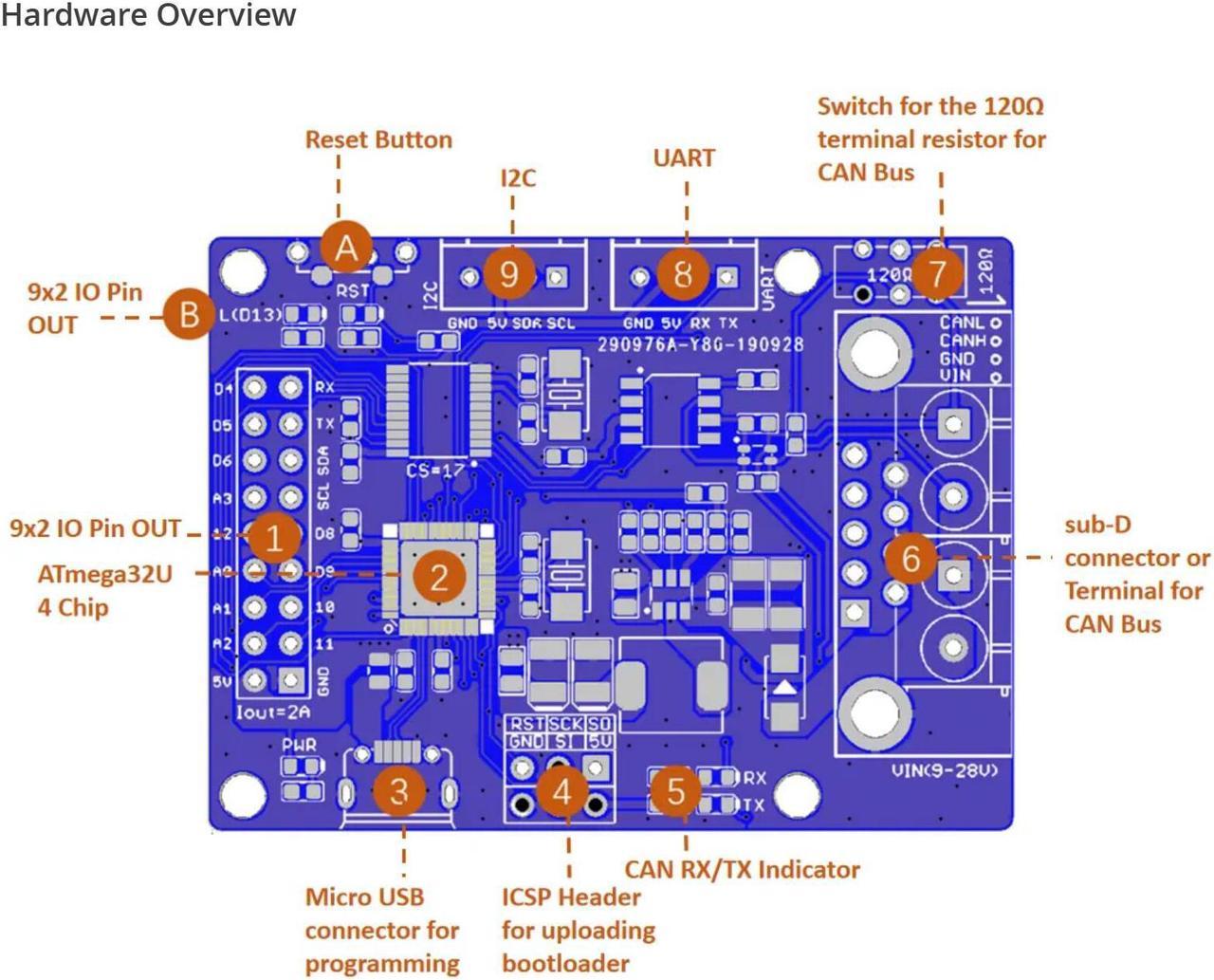
Hardware Overview
D-Sub CANbus PinOut
pin# Signal names Signal Description
1 Reserved Upgrade Path
2 CAN_L Dominant Low
3 CAN_GND Ground
4 Reserved Upgrade Path
5 CAN_SHLD Shield, Optional
6 GND Ground, Optional
7 CAN_H Dominant High
8 Reserved Upgrade Path
9 CAN_V+ Power, Optional
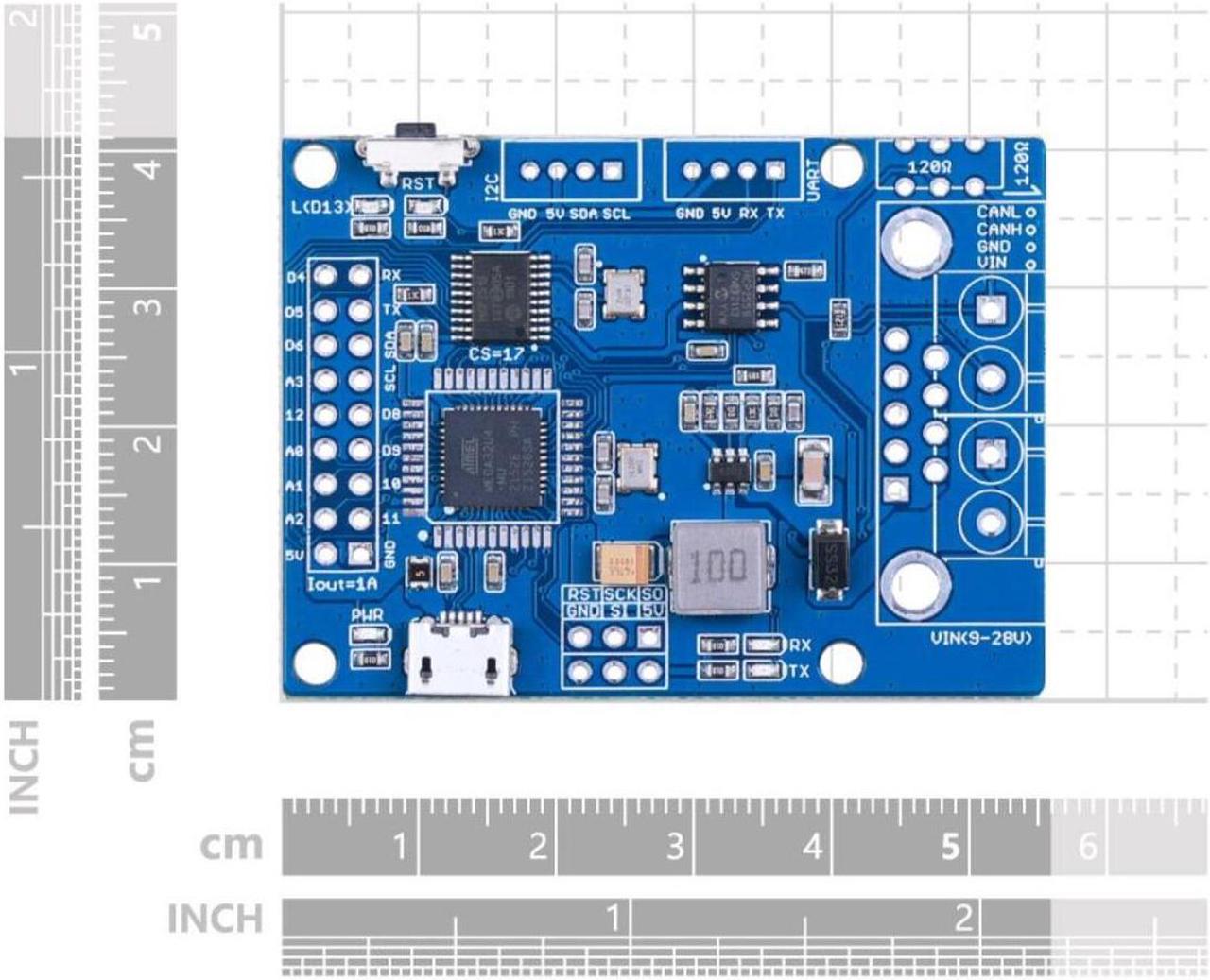
Switch for the 120 terminal resistor for CAN Bus
If you use this slaver at the end of the CAN bus, you need to solder a 120 resister between the two pads, if not just leave them alone.
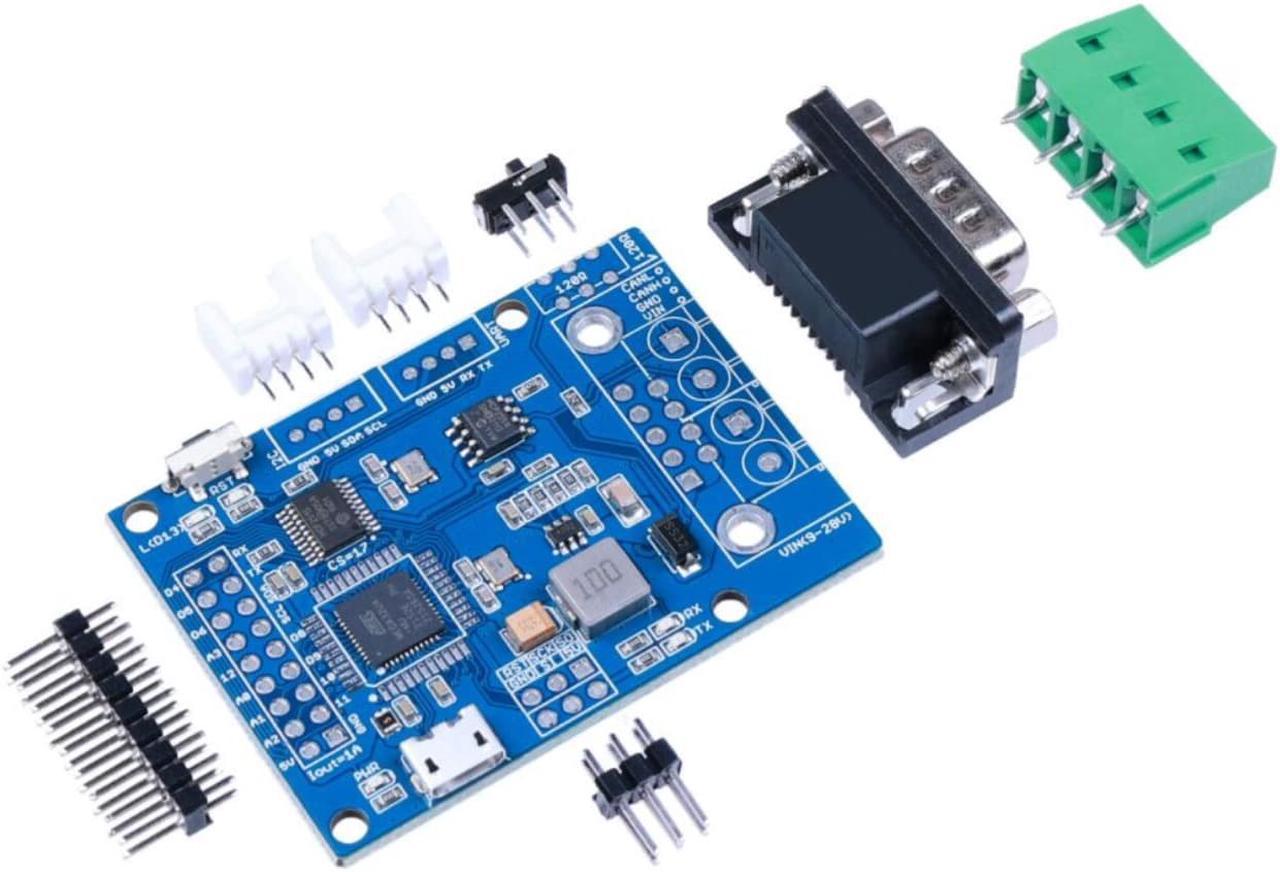
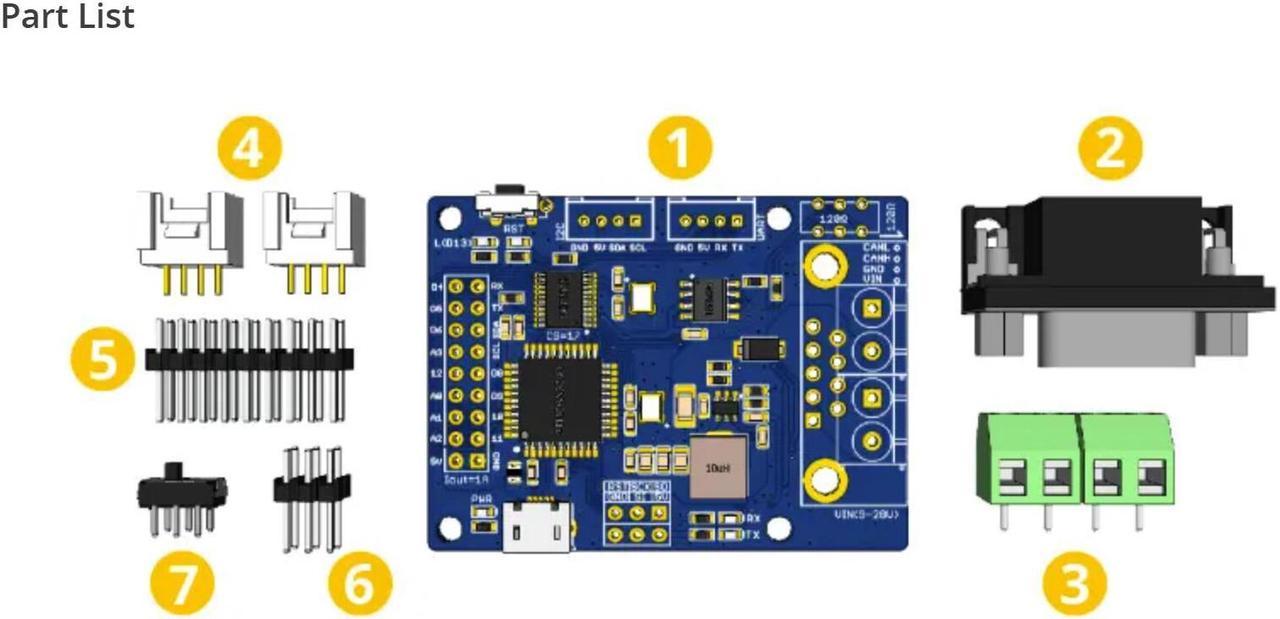
Part List
CANBed PCBA
1
sub-D connector 1
4PIN Terminal 1
4PIN 2.0 Connector 2
9x2 2.54 Header 1
3x2 2.54 Header 1
 Holiday Shipping Details & Extended Holiday Returns
Holiday Shipping Details & Extended Holiday Returns 





