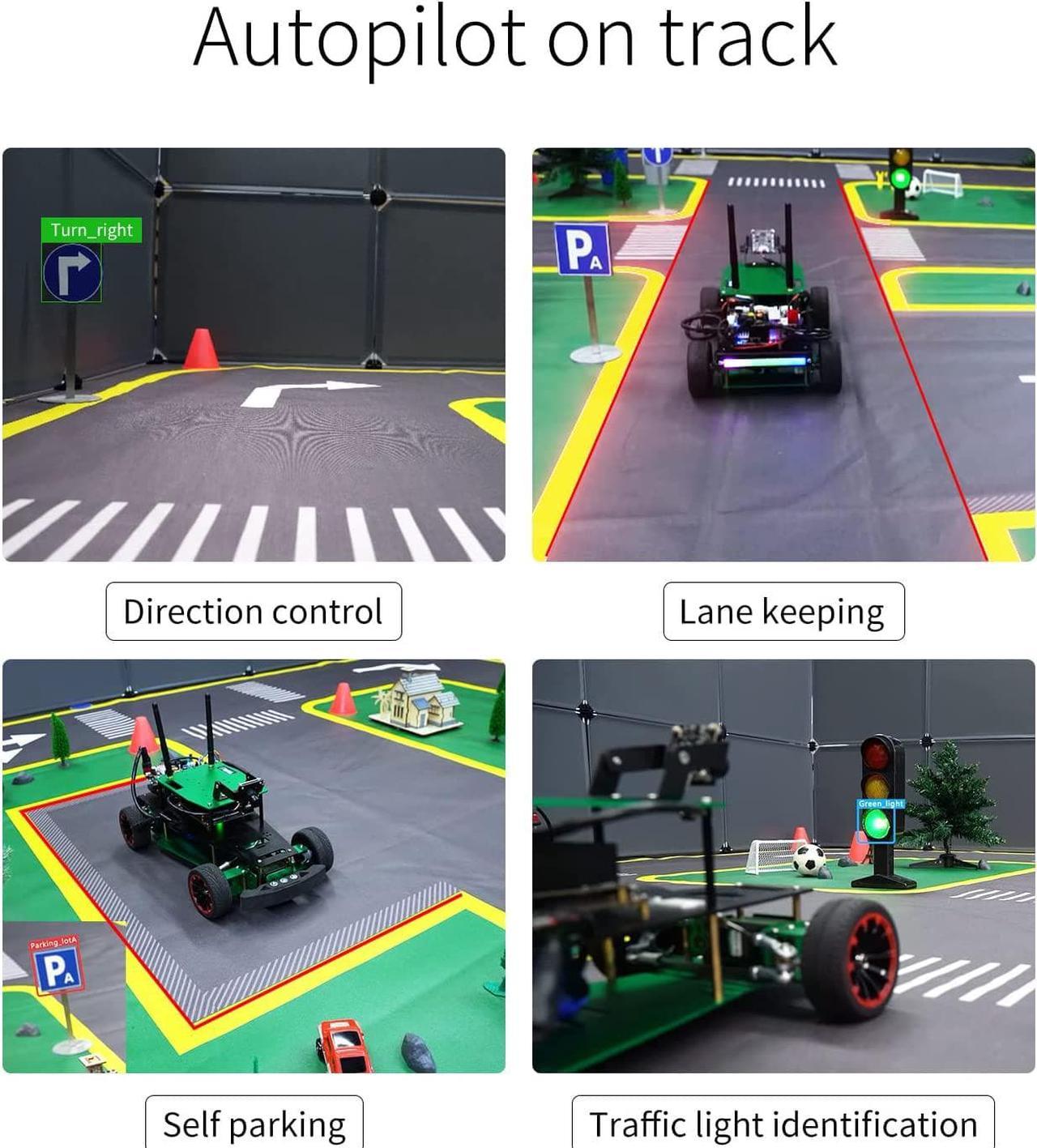
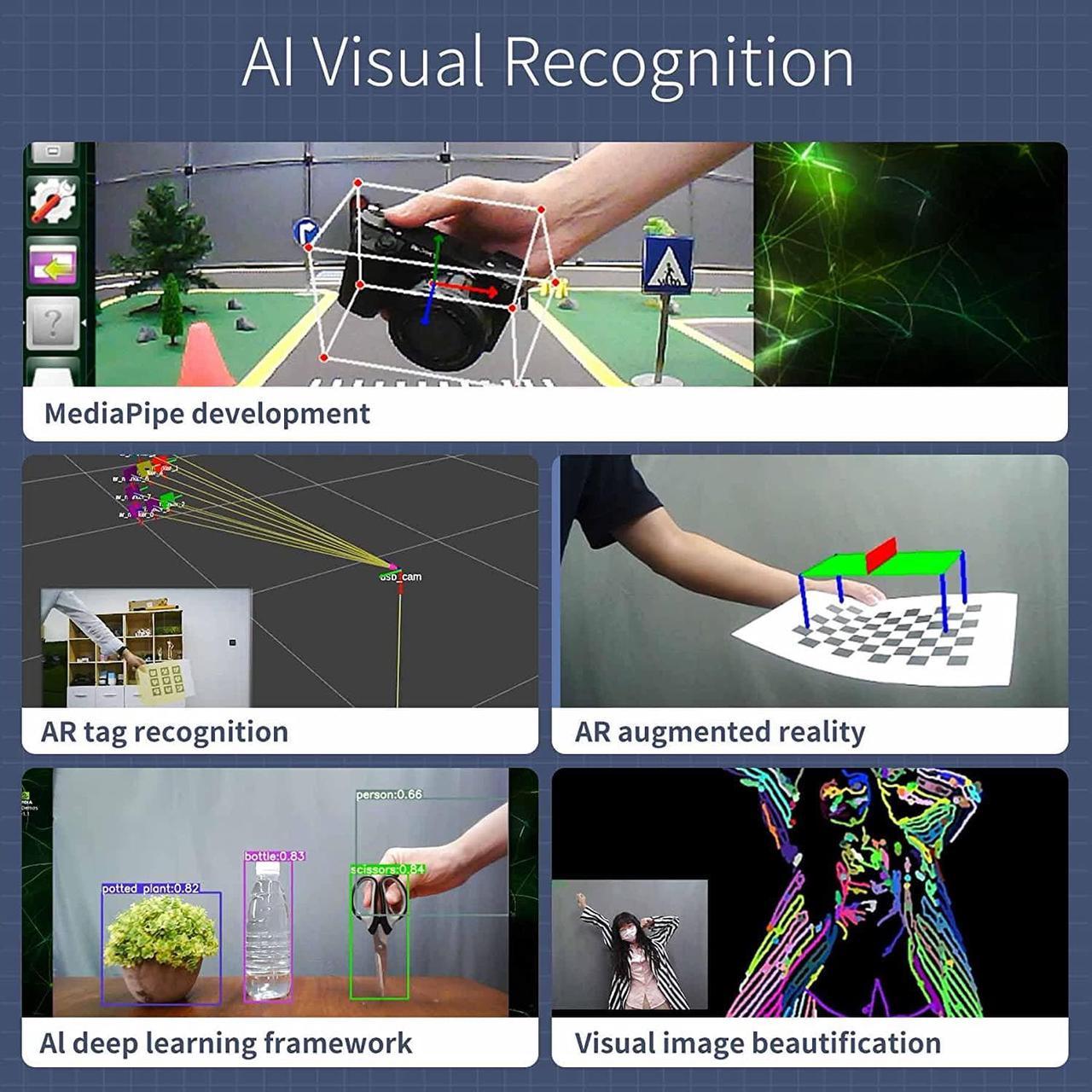
ROSMASTER R2L is a robot with Ackerman steering structure, designed for automatic driving. It supports the Jetson NANO/Xavier NX/TX2 NX board and is developed based on ROS and Ubuntu operating systems. We apply 2MP high-definition camera and combine some recognition algorithms to achieve model training, autopilot, object recognition, tag tracking and other functions. Like other Yahboom robot cars, R2L supports APP/handle emote control. We have provided 80 courses with Chinese and English subtitl
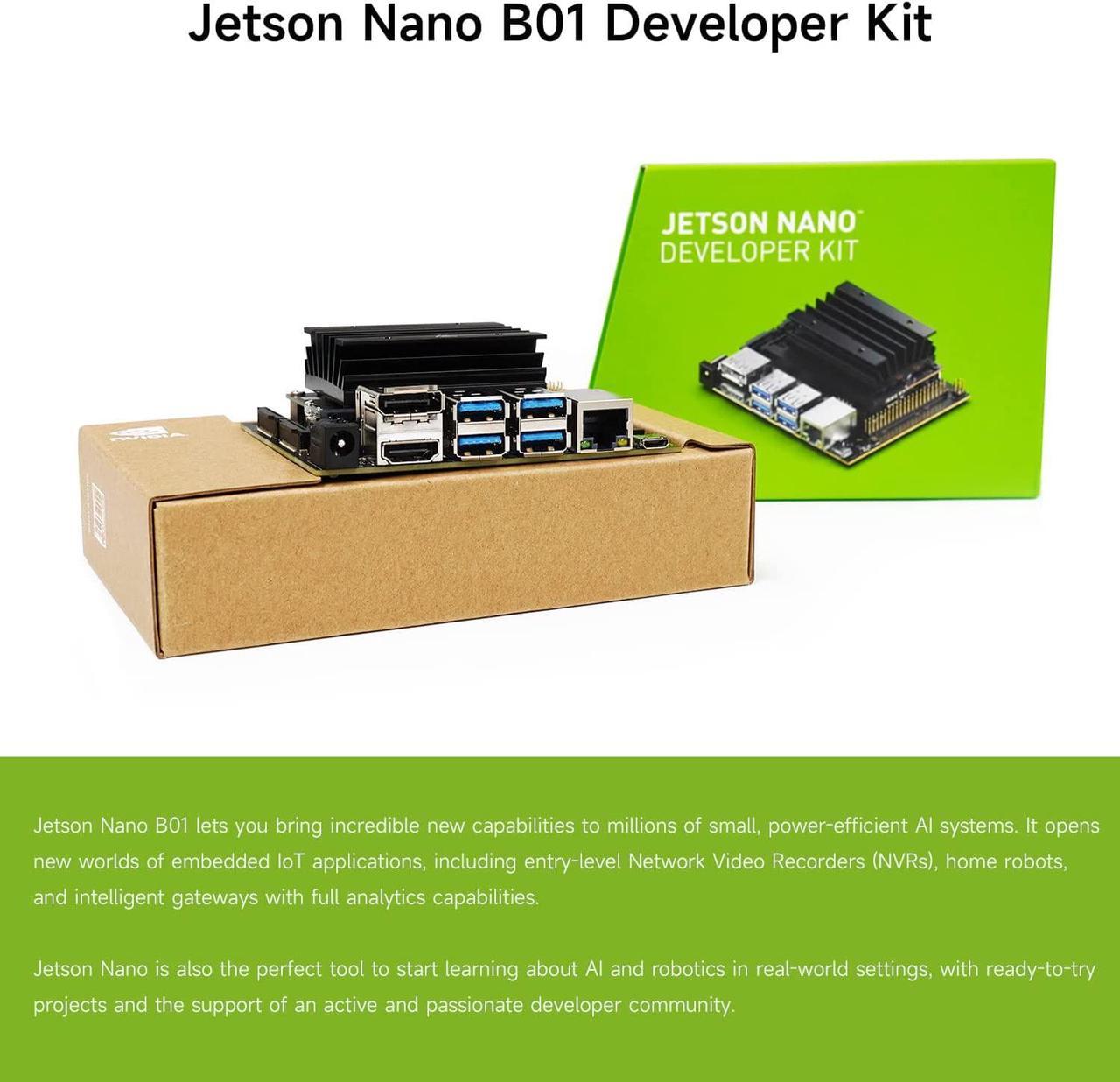
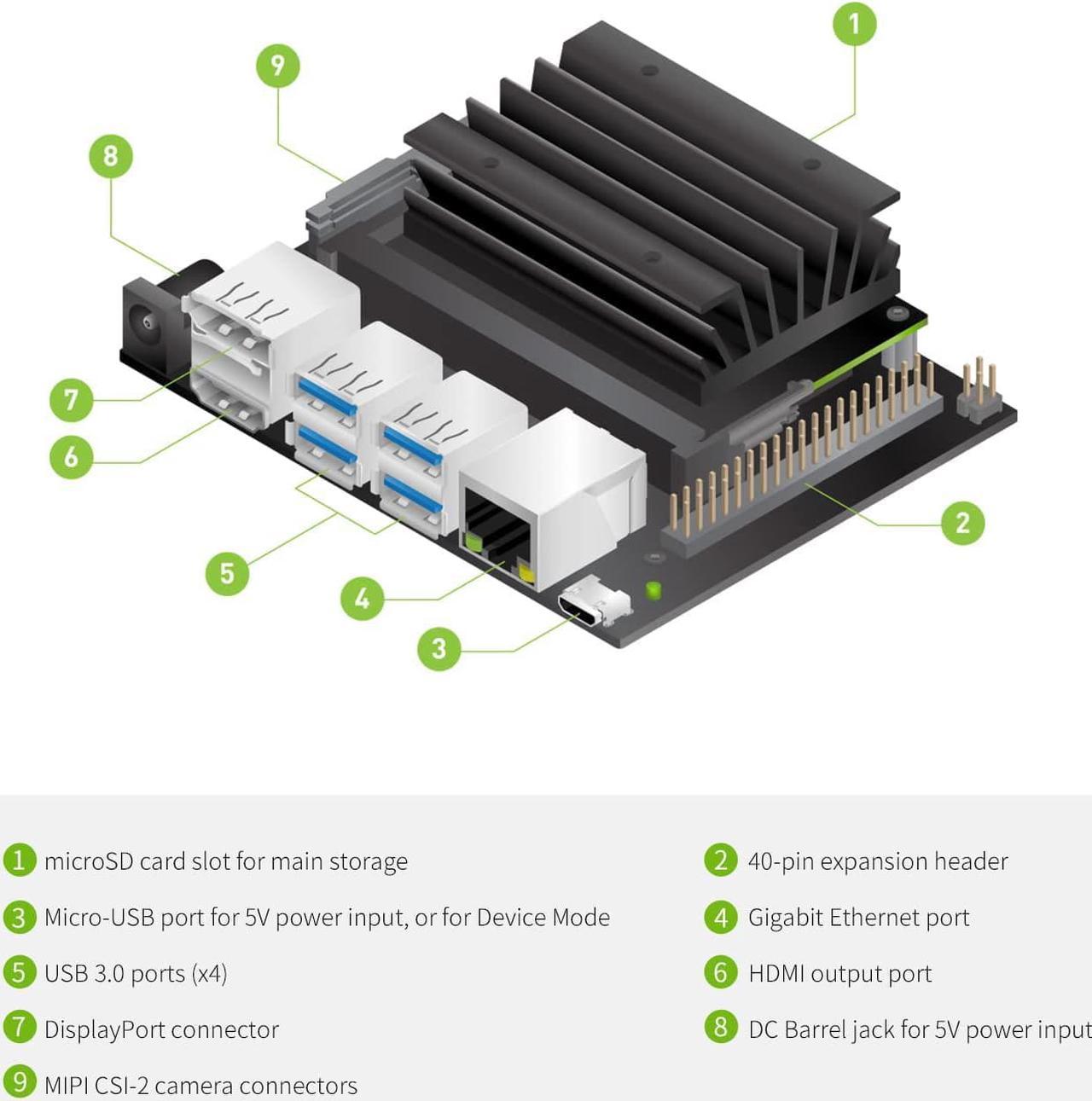
The developer kit can be powered by micro USB and has extensive I/O from GPIO to CSI. This allows programmers to easily connect a variety of new sensors to enable a variety of AI applications. Very energy efficient with power consumption as low as 5 watts.


 Holiday Shipping Details & Extended Holiday Returns
Holiday Shipping Details & Extended Holiday Returns 






